-
[ Janurary 14, 2014]
Professor Zhongkui Li makes new advances in cooperative control of multi-agent systems
-
Recently, Assistant Professor Zhongkui Li of the College of Engineering and his coauthors have made new advances in cooperative control of multi-agent systems and published several papers in IEEE Transactions on Automatic Control and Automatica, the leading journals in the control field.
In the last decade, cooperative control of multi-agent systems (also called multl-vehicle systems) has received compelling attention from various scientific communities, especially the systems and control community. A group of autonomous agents can coordinate with each other via communication or sensing networks to perform certain challenging tasks which cannot be well accomplished by a single agent. In the area of cooperative control of multi-agent systems, consensus is an important and fundamental problem.
Consensus means that a team of agents reaches an agreement on a common value by interacting with each other via a sensing or communication network. For the consensus control problem, the main task is to design appropriate controllers (called consensus protocols) to achieve consensus. Due to the large size of agents, limited sensing capability of sensors, and short wireless communication ranges, the consensus protocols have to be distributed, depending on only the local state or output information of the agents and their neighbors. Although many works have been published, the existing design methods generally requires the nonzero eigenvalue with the smallest real part of the Laplacian matrix, which however is global information in the sense that each agent needs to know the entire communication graph to compute it. How to design fully distributed consensus protocols depending on only local information is an important and open problem.
In the following two papers:
[1] Z.K. Li, W. Ren, X.D. Liu, M.Y. Fu, Consensus of multiagent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols,IEEE Transactions on Automatic Control, vol. 58, no. 7, pp. 1786-1791, 2013.
[2] Z.K. Li, W. Ren, X.D. Liu, L.H. Xie, Distributed consensus of linear multi-agent systems with adaptive dynamic protocols, Automatica, vol. 49, no. 7, pp. 1986-1995, 2013.
Professor Zhongkui Li and his coauthors, under the framework of consensus region, propose distributed adaptive consensus protocols based on the relative state and output information and show that these adaptive protocols are fully distributed. Paper [2] was originally submitted as a brief paper, but suggested by the editor to be resubmitted and finally accepted for publication as a regular paper, due to the good comments and strong recommendation of the reviewers.
In the paper ([3] Z.K. Li, Z.S. Duan, F.L. Lewis, Distributed robust consensus control of multi-agent systems with heterogeneous matching uncertainties, Automatica, in press, 2014. DOI: 10.1016/j.automatica.2013.12.008), professor Zhongkui Li and his coauthors addressed the distributed robust consensus problems for multi-agents systems with matching uncertainties, designed distributed adaptive consensus protocols and provided the theoretical proof.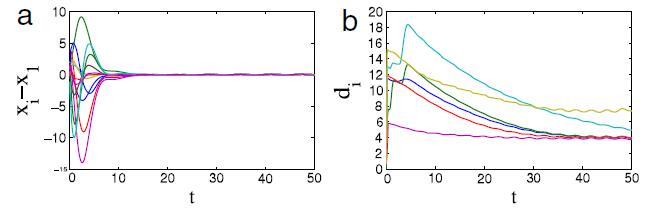
Consensus error and adaptive coupling weights