-
[ April 28, 2014]
Professor Guangming Xie’s group makes new progress in multi-agent systems
-
Recently, the research team led by Professor Guangming Xie from the College of Engineering of Peking University has made new progress in formation control of multi-agent systems. The research papers were published in the IEEE Transactions on Automatic Control and Automatica, the leading journals in the field of systems and control.
Multi-agent systems have gained significant attention in various research communities in recent years. This is partly due to the growing number of important and challenging applications of multi-agent systems in many areas including cooperative control of robotic vehicle networks, formation control, flocking, electric power networks, distributed sensor networks, synthetic biological networks, and congestion control in communication networks.
Prof. Guangming Xie’s group has rich experiences and has contributed several novel advances in the filed of multi-agent systems. Their research emphasizes the application in the cooperative control of mobile robots. Recently, Prof. Xie’s group investigated the pattern formation problems in multi-agent systems, specially the circle formation problem, and has achieved new progress.
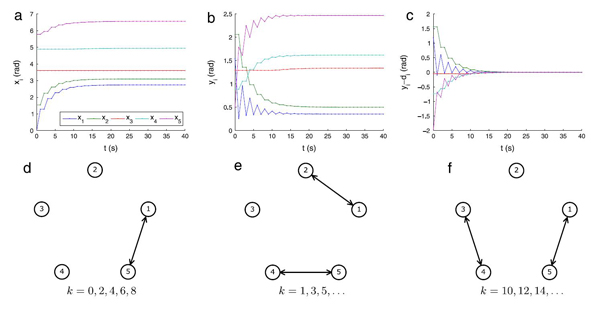
Xie’s group proposed distributed control laws for a group of anonymous mobile agents to form any desired circle formations when the agents move in the one-dimensional space of a circle. The agents are modeled by kinematic points. To make the control strategies more practical, they discussed the corresponding sampled-data control laws, and utilizing the technique of adopting time-varying gains, they obtained control laws that are able to guide the agents to form the desired circle formation within any given finite time. One feature of the proposed control laws is that they guarantee that the spatial ordering of the agents are preserved throughout the system’s evolution, and thus no collision may take place during the process of forming circle formations. Furthermore, they extended the results to second-order dynamic systems. This work has been published in the IEEE Transactions on Automatic and Control (C. Wang, G. Xie, M. Cao, Forming circle formations of anonymous mobile agents with order preservation, IEEE Transactions on Automatic Control, 58(12), 3248–3254, 2013).
Motivated by several types of mobile robots, Prof. Xie and his collaborators further imposed the locomotion constraint that the mobile agents can only move forward but not backward. Distributed cooperative, sampled-data control strategies were designed that only take nonnegative values. For this kind of input-constrained systems, they followed a novel approach that translates the unidirectional locomotion constraints into the time-varying neighbor relationships between agents. Consequently, they were able to obtain the closed-loop system dynamics in the form of time varying, switched, linear, discrete-time systems. Using tools from matrix analysis, they proved that the multi-agent system under such constrained control input could be guided to reach the prescribed circle formation asymptotically with the additional guarantee that no collision between agents ever takes place. This work has been published in Automatica as Regular paper (C. Wang, G. Xie, M. Cao, Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle, Automatica, 50(4), 1100–1108, 2014)?
The corresponding author of the two papers is Prof. Guangming Xie. The first author is Dr. Chen Wang in Prof. Xie’s group. This project is supported financially by the National Natural Science Foundation of China (NSFC). The collaborator of the project is Prof. Ming Cao at University of Groningen, the Netherlands.